[Raspberry Pi] DC motor control with L298
RaspberryPi DC motor control with L298
이 글은 라즈베리파이로 DC모터를 제어하는 방법에 대해 다룬다. DC 모터는 서보모터나 스텝모터와 달리 연속적인 회전을 하고, 방향과 속도를 지정하여 구동시킬 수 있다. DC 모터의 방향과 속도를 제어하기 위해서는 모터 드라이버가 필요하다. 이번 포스팅에서는 L298N이 탑재된 모터 드라이버 L298을 사용한다.
사용한 부품
회로도 구성
아래 그림과 같이 회로를 연결하면 된다. 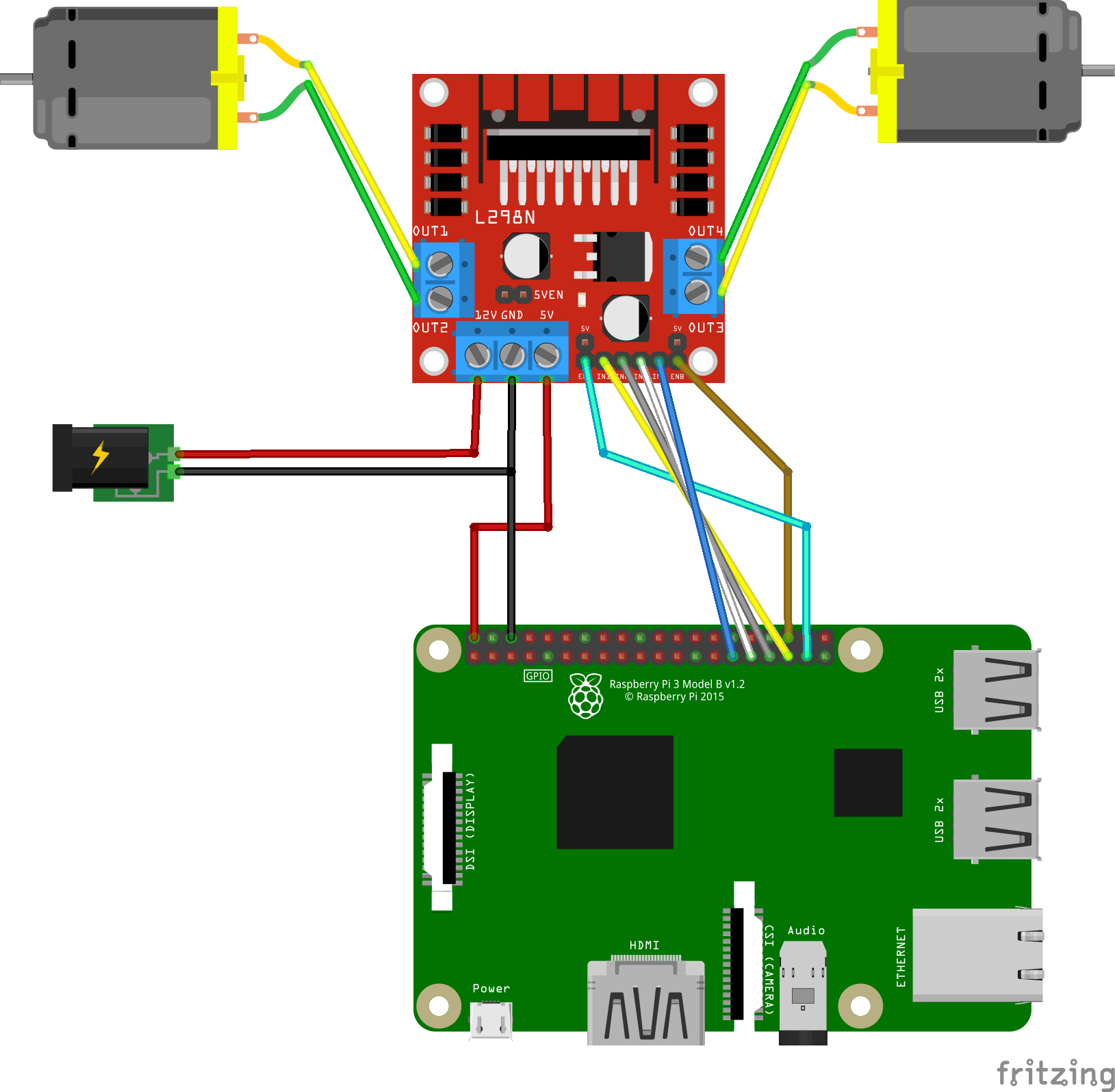
Python 예제 코드
아래 코드는 두 개의 DC 모터로 2륜 구동 차를 만들었을 때, forward, backward, left turn, right turn 기능을 구현한 코드이다.
크게 복잡한 로직은 없어서 이해하기에 무리가 없을 것 같아 자세한 설명은 생략한다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
import RPi.GPIO as GPIO
import time
GPIO.setwarnings(False) # Disable GPIO warnings
# Motor state definitions
STOP = 0
FORWARD = 1
BACKWARD = 2
# Motor channel definitions
CH1 = 0
CH2 = 1
# Pin mode definitions
OUTPUT = 1
INPUT = 0
# Pin state definitions
HIGH = 1
LOW = 0
# Motor driver pin assignments
ENA = 26
ENB = 16
IN1 = 19
IN2 = 13
IN3 = 6
IN4 = 5
spd = 100 # Default speed for motors (%)
# GPIO pin setup function
def set_pin_config():
GPIO.setmode(GPIO.BCM) # Set GPIO mode to BCM
GPIO.setup(ENA, GPIO.OUT)
GPIO.setup(ENB, GPIO.OUT)
GPIO.setup(IN1, GPIO.OUT)
GPIO.setup(IN2, GPIO.OUT)
GPIO.setup(IN3, GPIO.OUT)
GPIO.setup(IN4, GPIO.OUT)
pwm_a = GPIO.PWM(ENA, 100) # Create PWM instance for motor A with 100Hz frequency
pwm_b = GPIO.PWM(ENB, 100) # Create PWM instance for motor B with 100Hz frequency
pwm_a.start(0) # Start PWM with 0% duty cycle
pwm_b.start(0) # Start PWM with 0% duty cycle
return pwm_a, pwm_b
# Motor control function
def control_motor(pwm, INA, INB, speed, state):
pwm.ChangeDutyCycle(speed) # Set motor speed
if state == FORWARD:
GPIO.output(INA, HIGH)
GPIO.output(INB, LOW)
elif state == BACKWARD:
GPIO.output(INA, LOW)
GPIO.output(INB, HIGH)
elif state == STOP:
GPIO.output(INA, LOW)
GPIO.output(INB, LOW)
# Direction control function
def control_direction(ch, speed, state):
if ch == CH1:
control_motor(pwm_a, IN1, IN2, speed, state)
elif ch == CH2:
control_motor(pwm_b, IN3, IN4, speed, state)
def forward(speed):
control_direction(CH1, speed, FORWARD)
control_direction(CH2, speed, FORWARD)
def backward(speed):
control_direction(CH1, speed, BACKWARD)
control_direction(CH2, speed, BACKWARD)
def right_turn(speed):
control_direction(CH1, speed, BACKWARD)
control_direction(CH2, speed, FORWARD)
def left_turn(speed):
control_direction(CH1, speed, FORWARD)
control_direction(CH2, speed, BACKWARD)
# Stop function
def stop():
control_direction(CH1, 0, STOP)
control_direction(CH2, 0, STOP)
# GPIO pin setup
pwm_a, pwm_b = set_pin_config()
if __name__ == '__main__':
forward(spd)
time.sleep(2)
backward(spd)
time.sleep(2)
left_turn(spd)
time.sleep(2)
right_turn(spd)
time.sleep(2)
stop()
GPIO.cleanup()
참고 사항
1. GPIO.setwarnings(False)
라즈베리파이에서 GPIO를 사용하는 코드를 실행하면 에러가 뜨는 경우가 있다. 오류를 해결하고자 열심히 구글링 해본 결과 그냥 코드에 GPIO.setwarnings(False)를 추가해주면 된다.
라즈베리파이의 GPIO 라이브러리인 RPi.GPIO에서 경고 메시지를 비활성화하는 코드이다. 이를 사용하지 않으면 여러 가지 상황에서 경고 메시지가 출력될 수 있다. 주로 발생하는 경고 중 하나는 GPIO 핀을 설정하거나 사용 중에 이미 다른 프로세스에서 해당 핀을 사용하고 있을 때 발생하는 경고이다.
2. 라즈베리파이 핀 설정
라즈베리파이의 핀을 처음 사용해보는 사람은 GPIO.setmode(GPIO.BCM)이 어떤 코드인지 궁금할 것이다. 이에 대한 자세한 내용은 라즈베리파이 핀 설정: BOARD와 BCM 차이을 확인해보자.
This post is licensed under CC BY 4.0 by the author.